

Veículos subaquáticos
- Detalhes
- Publicado: Quarta, 22 Junho 2016
Originalmente publicado em: Pesquisa FAPESP. Ed. 244. Junho 2016.
Protótipos de robôs para uso embaixo d’água são testados na exploração de petróleo e pesquisas oceanográficas
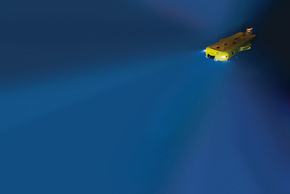 |
| FlatFish: desenvolvido para verificar tubulações e plataformas no fundo do mar. Tem 2,20 m de comprimento e desce a 300 m de profundidade © BG GROUP |
A partir da década de 1990, robôs submarinos que navegam de forma autônoma, sem precisar estar ligados a uma embarcação por cabos, começaram a surgir para auxiliar nas pesquisas oceanográficas e na exploração de petróleo e gás no fundo do mar. Com sensores para navegação submersa e GPS, quando estão na superfície, além de motores e equipamentos de comunicação por rádio, eles podem ser programados para ir e voltar de um local predeterminado. Receberam o nome de Veículos Autônomos Submersos (AUV, sigla para Autonomous Underwater Vehicle) e são produzidos por empresas de países como Estados Unidos, Noruega, Japão e França. No Brasil, as pesquisas e os desenvolvimentos nessa área são recentes, e ainda não foi produzido um robô submarino que possa ser fabricado comercialmente. Mas existem pelo menos três protótipos atualmente em fase de testes.
O mais recente é destinado à exploração de petróleo e gás, a área que mais oferece oportunidades tecnológicas e de aplicações operacionais de robôs AUV no país. A BG Brasil, uma subsidiária do Grupo Shell, desenvolveu um AUV chamado FlatFish em parceria com o Senai – Campus Integrado de Manufatura e Tecnologia (Cimatec), em Salvador (BA), e com o apoio da Empresa Brasileira de Pesquisa e Inovação Industrial (Embrapii) e da Agência Nacional do Petróleo, Gás Natural e Biocombustíveis (ANP). O robô será usado para inspeção visual em três dimensões (3D) de alta resolução de estruturas submarinas de exploração de gás e petróleo, como tubulações e oleodutos, cascos de navio e plataformas.
“É o primeiro protótipo desse tipo produzido no país”, avalia Rosane Zagatti, gerente de Tecnologia Subsea da empresa. “O veículo submarino autônomo irá contribuir na exploração em águas profundas, com redução de custos de operação entre 30% e 50%, e trazer maior segurança e menor impacto ambiental.” Ela explica que hoje as inspeções submarinas na indústria de óleo e gás são realizadas por veículos operados remotamente (ROV, sigla de Remotely Operated Vehicle), que precisam de um barco de apoio. O ROV é lançado ao mar por cabos a partir da embarcação, da qual é operado por controle remoto, por duas pessoas (piloto e copiloto). Dependendo do local onde é feita a inspeção, os custos do ROV podem chegar a cerca de US$ 200 mil por dia. “O FlatFish não requer barco de apoio, o que reduz muito os gastos”, diz Rosane. Para Marcos Reis, coordenador do projeto pelo Cimatec, o veículo apresenta grandes desafios tecnológicos e as vantagens de desenvolvê-lo são numerosas. “O robô diminui os riscos à integridade de navios, plataformas, tubulações e outras estruturas submersas por causa do aumento da frequência das inspeções, além de proporcionar melhores resultados no controle de qualidade”, diz. “Ele também reduz os riscos de segurança pessoal, eliminando a necessidade de tarefas perigosas para mergulhadores, em operações de apoio.”
 |
| Pirajuba: testes no mar de Ubatuba (SP). A versão para estudar plânctons tem 2,20 m de comprimento © EDUARDO CESAR |
A função do FlatFish é transmitir informações em tempo real, com imagens e dados. Para realizar essas tarefas, o robô conta com sensores, propulsores, computadores embarcados e inteligência computacional, com sistemas de identificação e tomada de decisão, se for preciso. “Ele foi desenvolvido para que possa navegar com grande estabilidade e capacidade de chegar muito próximo dos equipamentos que inspeciona ou até mesmo tocar neles”, explica Rosane. “O nosso veículo é capaz de residir no fundo do mar, em uma espécie de garagem. Desse local, depois de programado, ele sai para executar a missão de forma autônoma, coletando e enviando para um operador os dados de inspeção.” O equipamento é impulsionado por motores que funcionam com baterias de lítio, passíveis de ser recarregadas no fundo do mar, na garagem subaquática. A autonomia do FlatFish é de 35 quilômetros (km) a 60 km, dependendo da missão e das correntes marítimas. A cada seis meses o AUV precisa ser levado à terra para manutenção.
O protótipo foi testado e pode operar a uma profundidade de 300 metros. Segundo Reis, a equipe do Cimatec trabalha para que, em quatro ou cinco anos, o FlatFish consiga operar em uma profundidade de até 3 mil metros, tornando-o útil à exploração do pré-sal. Até agora foram investidos R$ 30 milhões no projeto, divididos igualmente entre a BG Brasil, a Embrapii e o Senai, cuja contribuição é contabilizada em salários de profissionais da entidade e uso de equipamentos e infraestrutura. O projeto teve ainda o apoio técnico do Instituto Alemão de Robótica e Inteligência Artificial (DFKI). A BG Brasil ainda não firmou parcerias para uma futura produção do robô submarino.
Outra vertente atual do uso de robôs submarinos está na exploração dos oceanos. O engenheiro naval Ettore Apolonio de Barros, professor da Escola Politécnica da Universidade de São Paulo (Poli-USP), começou a desenvolver um AUV em 2005, o Pirajuba (peixe amarelo, em tupi), com financiamento da FAPESP, para estudar a hidrodinâmica de um veículo autônomo submerso com formato de um torpedo, o que fez durante nove anos no Laboratório de Veículos Não Tripulados. O desenvolvimento do Pirajuba continuou com pesquisas realizadas sob a coordenação do biólogo Rubens Lopes, professor e chefe do Laboratório de Sistemas Planctônicos (Laps) do Instituto Oceanográfico (IO) da USP. Ele estuda a distribuição de plânctons (microrganismos que servem de alimento a várias espécies de peixes e outros animais marinhos) em partes da costa brasileira. “Em fevereiro de 2014, demos início a um projeto para modificar nosso AUV Pirajuba, dando a ele uma aplicação prática”, conta Barros. “Agora o objetivo é obter dados de plânctons.”
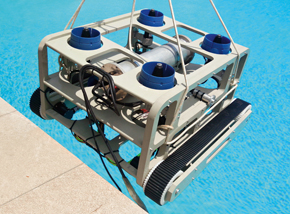 |
| HROV: esteiras para explorar estruturas submarinas como cascos de navios. Tem 1,20 m de comprimento e 1 m de altura © JUAN AVILA/UFABC |
A maneira tradicional de coletar dados nesse tipo de estudo é lançar, em vários pontos da área a ser pesquisada, uma sonda com sensores específicos a partir de uma embarcação. “Com um AUV basta programar a rota e largar a máquina na água”, diz o pesquisador. O minissubmarino não tripulado possui sete microprocessadores a bordo, que se comunicam entre si, além de sensores para navegação e outros específicos para pesquisa de microrganismos, como indicadores de condutividade e temperatura da água e profundidade. “O veículo também inclui sensores ópticos, que emitem luz ultravioleta para medir partículas suspensas na água, além da presença de clorofila e cianobactérias.” Baterias de lítio garantem uma autonomia aproximada de 10 horas. Depois de 2014, o veículo tem sido avaliado no mar, ao redor da ilha Anchieta, na região de Ubatuba, no litoral norte de São Paulo. No ano passado, o veículo coletou dados para a caracterização de plânctons na região. Ettore conta que o seu laboratório está aberto à cooperação com empresas para a transferência de tecnologia e possível produção do equipamento.
Grudado no casco
Na Universidade Federal do ABC (UFABC), o engenheiro mecânico Juan Pablo Julca Avila, professor do curso de Engenharia Aeroespacial, desenvolveu, com apoio da FAPESP, um robô submarino diferente. Trata-se de um veículo híbrido (HROV, sigla de Hybrid Remotely Operated Vehicle). “Ele é semiautônomo, com dois modos de operação, navegação livre e rastejamento”, explica o pesquisador. “Quando é lançado no mar, o veículo entra em modo autônomo, baseado em propulsores para se dirigir e se aproximar da estrutura submersa a ser inspecionada. O HROV atraca automaticamente e a partir daí entra em modo de rastejamento, com esteiras e a direção remota de um operador.”
O veículo consiste em uma estrutura feita de placas de polipropileno com seis propulsores a hélice para o movimento de navegação livre em cinco direções: avanço, profundidade, balanço longitudinal, transversal e guinada, e duas esteiras motorizadas de borracha para sua locomoção na superfície submersa. Um conjunto de sensores torna possível medir os movimentos do veículo em trajetórias predefinidas. “O protótipo já passou por vários testes hidrodinâmicos e de controle em tanque de provas”, diz Avila. “Estamos na segunda fase de desenvolvimento, na qual o sistema de controle de navegação e de rastejamento está sendo implementado. Depois, vamos testá-lo no mar.”
 |
| OceanOne: traços humanos, câmeras nos olhos e sensores nas mãos para alcançar lugares perigosos para mergulhadores © FREDERIC OSADA E TEDDY SEGUIN/DRASSM/UNIV. STANFORD |
A locomoção do veículo é feita por motores alimentados por eletricidade fornecida por meio de um cabo umbilical com uma embarcação, que também serve para controle e comunicação. O HROV será usado como plataforma experimental para conduzir pesquisas em dinâmica e controle dessa classe de veículos em ambiente marinho e para análise de espessuras de estruturas submarinas. Ao chegar perto de um navio, por exemplo, o robô se posiciona de maneira que sua base fique em contato com o casco. A partir daí, as esteiras motorizadas são acionadas para o deslocamento. O contato é mantido por força mecânica gerada pelos propulsores. Quando giram num sentido, o robô se “gruda” no casco; quando giram em outro, ele desgruda. Segundo Avila, essa classe de equipamento com atracamento baseado em esteiras já é comercializada por uma empresa no exterior. Como os outros projetos, Avila ainda não tem perspectivas de produção de seu robô. “Estamos abertos aos interessados, que podem ser alunos ou pesquisadores qualificados para trabalhar no desenvolvimento do equipamento”, explica Avila. “Atualmente buscamos parcerias com empresas de robótica para a conclusão do desenvolvimento dos sistemas de localização acústica e de calibração de espessuras.”
As formas dos robôs submarinos são diversas, como mostram os três projetos brasileiros. O mais curioso e avançado é um projeto norte-americano que fez o seu primeiro mergulho em abril deste ano no mar Mediterrâneo. Elaborado por um grupo de pesquisadores da Universidade Stanford, nos Estados Unidos, o OceanOne é um robô humanoide mergulhador. Com tamanho e aparência aproximados de um ser humano, ele é dotado de inteligência artificial, com softwares que fazem identificação de padrões e realizam associações. A cabeça tem câmeras com visão estereoscópica no lugar dos olhos, dois braços articulados e mãos com dedos cheios de sensores que dão respostas táteis. No lugar das pernas, aparece uma “cauda” que abriga baterias, computadores e oito propulsores multidirecionais. É operado remotamente por meio de joystick.
O robô é um mergulhador virtual, uma espécie de avatar. Quando o OceanOne pega um objeto, por exemplo, o operador pode sentir o peso e a força da pegada. A ideia de desenvolvê-lo surgiu da necessidade de pesquisadores da Universidade Rei Abdullah de Ciência e Tecnologia (Kaust), da Arábia Saudita, de estudar e monitorar recifes de corais no mar Vermelho. O primeiro mergulho oficial do robô foi uma visita aos destroços do galeão La Luna, navio da frota do rei francês Luís XIV, que naufragou em 1664 a 32 km da costa e está a 100 metros de profundidade. O OceanOne mostrou imagens do barco afundado e trouxe um vaso para a superfície.
Projetos
1. Detecção de camadas finas por veículo autônomo submersível em um ecossistema costeiro – Projeto Ecoauv (nº 2013/16669-7); Modalidade Auxílio à Pesquisa – Regular; Pesquisador responsável Ettore Apolonio de Barros (USP); Investimento R$ 198.851,41 e US$ 50.583,98.
2. Desenvolvimento de veículos autônomos submarinos de baixo custo. Parte A: Manobrabilidade e sistema de propulsão (nº 2005/55847-1); Modalidade Auxílio à Pesquisa – Regular; Pesquisador responsável Ettore Apolonio de Barros (Poli-USP); Investimento R$ 71.726,87.
3. Desenvolvimento de um veículo robótico submarino para inspeção de cascos de navio (nº 2011/51955-5); Modalidade Auxílio à Pesquisa – Regular; Pesquisador responsável Juan Pablo Julca Avila (UFABC); Investimento R$ 288.274,93.