

Cientistas tentam lançar robô submarino até a África
- Detalhes
- Publicado: Segunda, 21 Julho 2014
Estadão. Blogs Herton Escobar. 21/07/2014.
REPORTAGEM ESPECIAL: Herton Escobar (textos) e Marcio Fernandes (fotos).
Glider RU 29, um veículo autônomo de pesquisa controlado via satélite, vai coletar dados oceanográficos sobre o Atlântico Sul, numa travessia solo de 6,5 mil km do litoral paulista até a Cidade do Cabo, na África do Sul. Equipe de reportagem do Estado acompanhou a primeira tentativa de lançamento da costa brasileira, que acabou não dando certo por causa de problemas técnicos. Leia e veja como tudo aconteceu.
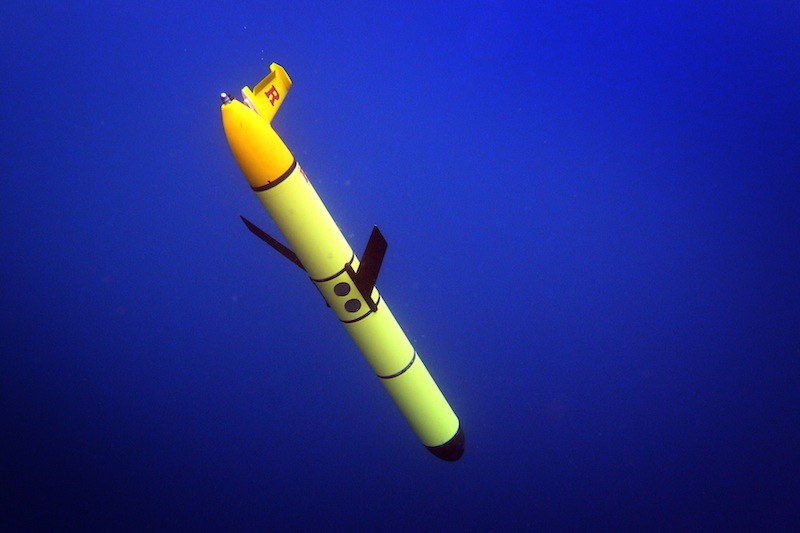
Glider RU 29, submerso na costa brasileira. Foto: Marcio Fernandes / Estadão.
Era 1h45 da madrugada, dia 12 de julho, quando o barulho de um sino digital finalmente ecoou pelo interior do navio no Porto de Santos. “Está ouvindo esse som? É o som mais lindo que há; é música para os meus ouvidos”, comemorou o oceanógrafo Scott Glenn, da Universidade Rutgers, após um angustiante período de mais de 12 horas aguardando essa “ligação”. Do outro lado da linha, fazendo contato via satélite, estava o “glider” RU 29, um robô em forma de torpedo amarelo que Glenn e sua equipe, com apoio do Instituto Oceanográfico da USP, havia lançado ao mar por volta do meio-dia do dia anterior, a mais de 200 km da costa, e que desde então estava desaparecido.
A mensagem que fez o sino tocar no computador do seu aluno estava escrita em código, mas poderia ser traduzida como “Estou vivo”. Era tudo que a equipe precisava ouvir naquele momento.
Doze horas antes, o glider (“planador”, em inglês, que é como esses robôs são chamados) fora lançado sem problemas do convés do Alpha Delphini, um dos navios de pesquisa oceanográfica da USP, que enfrentou uma enjoativa viagem de 16 horas de navegação do Porto de Santos até a borda da plataforma continental brasileira, de onde o RU 29 deveria iniciar uma longa e solitária viagem em direção à Cidade do Cabo, na África do Sul.
Duas horas depois do lançamento, porém, quando o navio já estava no caminho de volta para Santos, o glider “desapareceu” – parou de se comunicar via satélite com o seu controlador em terra. Com o mar indigesto e sem uma coordenada de GPS para orientar a busca, não fazia sentido voltar para procurar o aparelho. Ele poderia estar em qualquer lugar, tanto na superfície quanto no fundo. “Numa situação dessas, tudo que você pode fazer é torcer para o glider se salvar sozinho”, lamentou Glenn, com a experiência de quem já realizou mais de 350 missões com esse tipo de aparelho – e que já perdeu sete deles; incluindo alguns sem explicação, que simplesmente desapareceram.
“O mar é um ambiente inóspito; as coisas sempre podem dar errado, especialmente quando você desafia as fronteiras da tecnologia”, avalia Glenn, com o cansaço estampado no rosto. “Mas você não pode se deixar derrotar por isso; o oceano é importante demais para não ser explorado.”
Equipado com sensores de profundidade, temperatura e salinidade, o RU 29 (assim chamado por ser o 29º glider da Rutgers University) tem como missão atravessar o Atlântico, do Brasil até a África do Sul, coletando dados oceanográficos e transmitindo-os para os pesquisadores via satélite ao longo do caminho. Uma travessia pioneira de 6,5 mil quilômetros, prevista para durar entre nove meses e um ano, e que deverá ser a última e mais longa pernada de uma volta, de 15 mil quilômetros, ao redor de toda a bacia oceânica do Atlântico Sul – o oceano menos estudado do planeta.
O equipamento “sumiu” depois de descer para um mergulho de 300 metros de profundidade, que deveria durar cerca de uma hora. Ao voltar à superfície, ele deveria ter “ligado para casa”, como dizem os pesquisadores, mas não ligou. Como qualquer mãe preocupada com um filho que não liga, eles esperaram por mais uma hora, duas, até se convencer de que algo realmente estava errado.

O pesquisador Marcelo Dottori e um tripulante do Alpha Delphini levam o glider de volta para a embarcação, depois de resgatá-lo em alto mar. Crédito: Marcio Fernandes/Estadão
Passamos, então, várias horas debatendo o que poderia ter acontecido, enquanto o barco voltava para Santos. Além de Glenn, estavam a bordo do Alpha Delphini o técnico Chip Haldeman, da Rutgers, e o oceanógrafo Marcelo Dottori, do Instituto Oceanográfico (IO) da USP. A ponte de comunicação com o glider era feita por David Aragon (o “operador”), outro jovem técnico da Rutgers, que ficara em Santos a bordo do Alpha Crucis, o outro navio de pesquisa da USP.
A primeira hipótese levantada por Glenn e Haldeman foi a de um ataque de tubarão – algo bastante improvável, mas que já aconteceu com outro glider. Ou talvez ele tivesse sido “fisgado” pela rede de algum navio pesqueiro de passagem – mas não tínhamos avistado nenhum durante toda a viagem.
Depois de muito “brainstorming” e muitas ligações, Haldeman descobriu que havia um “bug” (um erro de programação) no software do sistema operacional do robô, que deveria ter sido corrigido antes do lançamento, mas não foi. O tal “bug” influenciava justamente o tempo de espera do robô para fazer uma conexão via satélite, o que poderia explicar porque ele não estava conseguindo ligar para casa, ainda que todo o resto estivesse funcionando bem.
E foi justamente o que aconteceu. Quando, por sorte, ele finalmente conseguiu ligar, à 1h45 do dia 12, Aragon ordenou que ele permanecesse na superfície tempo suficiente para deletar o “bug”. E depois disso, tudo voltou ao normal … pelo menos por algumas horas.
Antes de dar a ordem de reiniciar a missão em direção à África, os pesquisadores optaram por fazer mais alguns mergulhos-testes com o equipamento, para ter certeza de que ele estava bem e o sistema de comunicação estava normalizado. E eis que um novo problema surgiu: Ao voltar de um mergulho a 1 mil metros de profundidade, o glider acusou um vazamento; como se água tivesse penetrado por alguma falha em seu casco.
À distância, não havia como saber se o vazamento era real, ou se o sinal de vazamento era mais uma falha de software. Os cientistas, então, optaram por abortar o início da missão e ordenaram ao glider que voltasse para “casa” – neste caso, o Porto de Santos – realizando apenas mergulhos rasos, até 100 metros de profundidade. Assim ele percorreu mais 95 km em direção à costa, até ser resgatado por Dottori e a tripulação do Alpha Crucis, na primeiras horas da manhã do dia 17 – sem nenhuma avaria aparente no casco.
O robô, agora, receberá novas baterias e passará por uma inspeção completa em terra, antes de ser lançado de novo ao mar, o que deverá ocorrer até o final de agosto. A missão de chegar à Cidade do Cabo continua de pé.
Dottori, que está desenvolvendo o primeiro programa de gliders no Brasil, encara o contratempo com naturalidade. “Isso é o dia a dia da oceanografia. Nunca é fácil trabalhar no mar”, diz. “Se você não for persistente, não consegue fazer nada.”
MISSÃO CIENTÍFICA
Chegar à África do Sul com o RU 29 faz parte de um projeto maior, chamado Challenger Glider Mission, envolvendo 16 gliders, que tem como desafio completar um giro nas cinco grandes bacias oceânicas do planeta: as do Atlântico Norte, Atlântico Sul, do Oceano Índico e do Pacífico Norte e Pacífico Sul.
A travessia Santos-Cidade do Cabo é a terceira e última pernada que falta para completar uma volta no giro do Atlântico Sul, que será a primeira bacia a ser “completada” pelo projeto. A primeira pernada, iniciada em janeiro de 2013, foi da Cidade do Cabo até Ascensão, uma ilha britânica isolada no meio do Atlântico. A segunda, iniciada em novembro de 2013, foi de lá até Ubatuba, no litoral norte de São Paulo, onde o robô foi recuperado em 18 de maio, também pelo Alpha Delphini — sempre levado pelo comandante Carlos Gouvea.
“O Brasil e a África do Sul servem estrategicamente como encruzilhadas para uma série de correntes marítimas, por isso são parceiros muito importantes nesse projeto; e por isso faz todo sentido começar nossa missão por aqui, no Atlântico Sul – que, aliás, é extremamente carente de dados, o que significa que o impacto científico do projeto também será maior aqui”, justifica Glenn.
Os gliders vêm ganhando espaço nos últimos anos como uma alternativa robótica ao uso de navios para coleta de dados oceanográficos em grande escala. Eles são veículos autônomos submersíveis, controlados via satélite, que podem ser equipados com uma série de sensores, para registrar diversos parâmetros oceânicos à medida que se movem pela água, como temperatura, salinidade, concentração de clorofila, turbidez, correntes e carbono orgânico dissolvido.
Funcionam, essencialmente, como estações meteorológicas móveis (e em forma de torpedo), que monitoram o oceano em vez da atmosfera. O objetivo científico da Missão Challenger (além do desafio tecnológico que a motivou originalmente) é produzir dados para alimentar os modelos matemáticos que os oceanólogos usam para prever o comportamento do oceano, da mesma forma que os meteorologistas utilizam parâmetros da atmosfera (temperatura, pressão, umidade, ventos, etc) para fazer a previsão do tempo.
A maior parte das informações que alimentam esses modelos hoje são geradas por satélites – que monitoram, por exemplo, a temperatura da água na superfície – e por uma rede de milhares de sensores flutuantes, chamada Argo, que ficam à deriva nos oceanos, monitorando temperatura, salinidade e correntes.
O que acontece na superfície, porém, é apenas um pequeno capítulo nessa história. Uma grande lacuna que existe nesses modelos, e que os gliders têm potencial para preencher, é a falta de dados reais sobre o que acontece nas camadas mais profundas dos oceanos. “Queremos saber qual é a acurácia desses modelos teóricos, até que ponto eles representam a realidade, e para isso precisamos de muito mais dados, principalmente sobre o que está acontecendo em águas mais profundas”, explica Glenn.
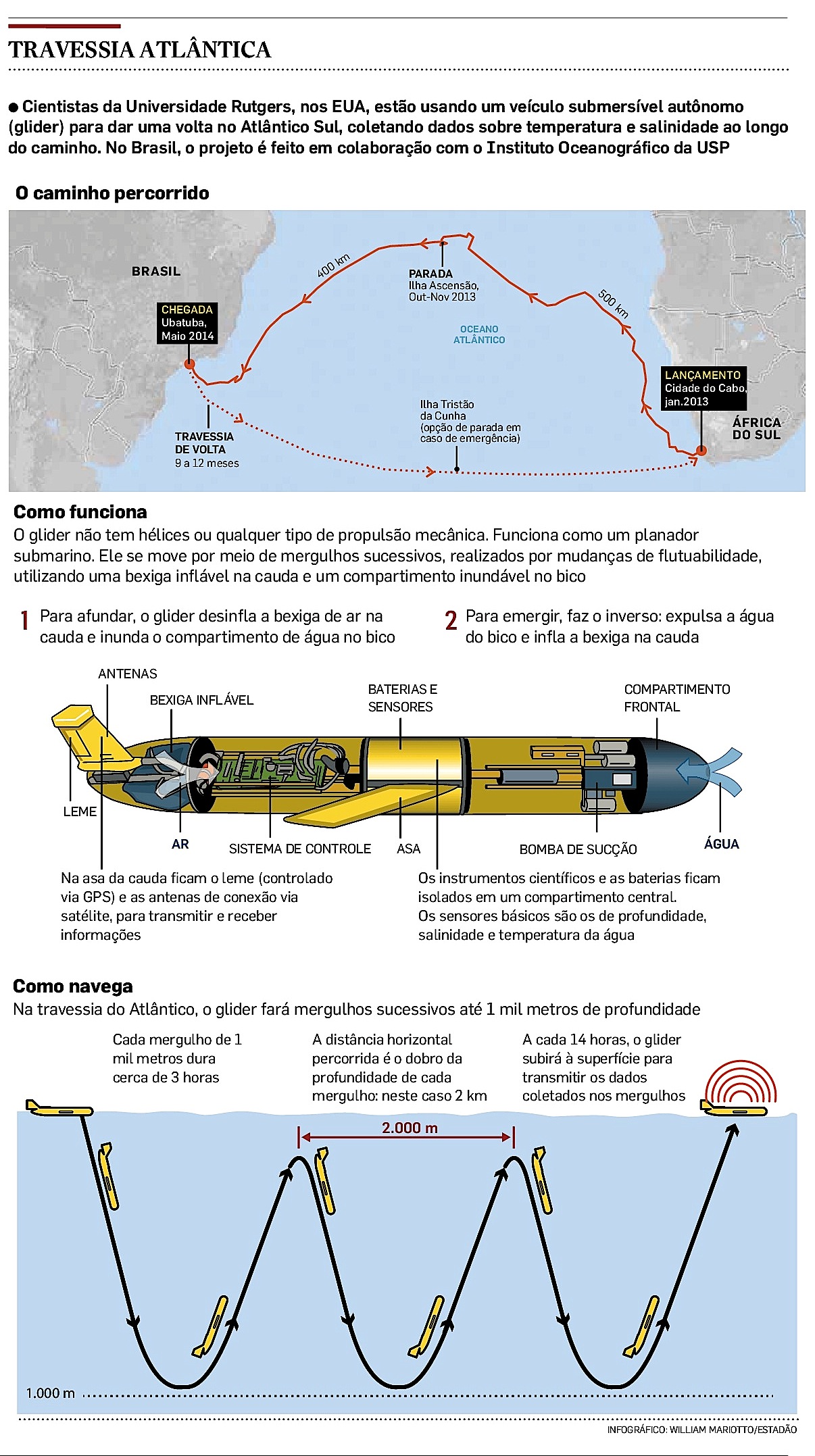
Os “gliders” têm esse nome porque se movem como um planador submarino. Eles não possuem hélices, motores nem qualquer tipo de propulsão mecânica. São orientados via GPS e se deslocam lentamente por meio de mergulhos sucessivos, realizados por meio de mudanças de flutuabilidade. Para afundar, enchem o bico de água e desinflam uma bexiga de ar na cauda. Para emergir, inflam a bexiga e esvaziam o bico. E assim, nesse sobe e desce, seguem em frente, percorrendo na horizontal o dobro da distância de cada mergulho na vertical (para cada mergulho até 100 metros de profundidade, por exemplo, o aparelho se desloca 200 metros na superfície, medidos entre o ponto de início e término do mergulho — veja infográfico acima).
O plano para a travessia do Atlântico Sul é que o RU 29 se desloque por meio de sucessivos mergulhos de 1 mil metros de profundidade cada um, o que lhe permitirá percorrer entre 18 km e 20 km por dia, pegando carona primeiro na corrente das Malvinas e depois, na corrente de Benguela. A ideia é que a travessia ocorra sem paradas – até porque não há muito onde parar nesse caminho; a única opção para resgate do glider, em caso de emergência, é na Ilha de Tristão da Cunha, um dos lugares mais isolados do mundo.
Em caso de sucesso, será a segunda mais longa travessia já realizada por um glider. A primeira foi uma travessia do Atlântico Norte, realizada em 2009, também pela equipe da Rutgers.

Repórter com o glider, durante a operação de resgate do aparelho. Crédito: Marcio Fernandes/Estadão
FUTURO ROBÓTICO
O sonho de Glenn é ter “portos de gliders” espalhados por todos os continentes, de forma que essa tecnologia possa ser usada de forma mais rotineira e abrangente no futuro, com pessoas habilitadas para operar esses robôs espalhadas por todo mundo.
O Brasil, se tudo der certo, deverá ser um desses primeiros portos – mais especificamente, na base do Instituto Oceanográfico da USP em Ubatuba. O instituto adquiriu recentemente três gliders: um para águas profundas, quase idêntico ao RU 29, e dois para águas mais rasas, até 200 metros de profundidade.
Segundo Dottori, os aparelhos deverão entrar em operação nas próximas semanas, faltando apenas concluir a habilitação do sistema de comunicação via satélite (Iridium). “A ideia é fazer os primeiros testes em agosto e lançar as primeiras missões oficiais em setembro”, diz o pesquisador.
A primeira missão científica dessa frota brasileira, segundo ele, será estudar o comportamento da chamada Água Central do Atlântico Sul, uma grande massa de água fria e rica em nutrientes que se aproxima da costa paulista durante o verão, e que tem grande influência sobre os sistemas físicos e biológicos da costa sudeste do País. “A primeira coisa que queremos investigar é a dinâmica dessa massa d’água, mas certamente haverá muitos outros objetos de estudo”, afirma Dottori. “Uma vez que você tem uma tecnologia dessas nas mãos, a quantidade de perguntas que surge sobre a mesa é enorme. Vamos descobrir tudo que podemos fazer ainda com esses robôs.”
“Estamos vivenciando os primórdios da exploração robótica dos oceanos”, afirma Glenn.
A compra dos 3 gliders pela USP não tem relação com a Missão Challenger, da qual o Instituto Oceanográfico participa como colaborador da Rutgers apenas para este trecho do projeto, dando apoio logístico e contribuindo com seu conhecimento local sobre o mar brasileiro. A parceria com os cientistas da universidade americana, porém, será valiosíssima para o desenvolvimento dessa tecnologia no Brasil.
Os gliders são construídos pela empresa Teledyne Webb Research e testados pela equipe da Rutgers em missões científicas ao redor do mundo. Cada aparelho custa cerca de US$ 160 mil.
REPORTAGEM ESPECIAL: Herton Escobar (textos) e Marcio Fernandes (fotos)